Haptic feedback and actuators use mechanical, electrical, or thermal systems to simulate touch, motion, or vibration. They enhance user experiences in devices like smartphones, VR systems, and medical tools by providing realistic tactile sensations, improving interaction, and increasing immersion in virtual environments through physical feedback cues.
Contents covered in this article
What is Haptics?
Haptics in product design refers to how information can be communicated through the sense of touch using science and technology, so when virtual objects are touched, they seem real and discernible. Haptics for the sense of touch is similar to what displays, and optics are for sight and audio or alarms for hearing. There are many reasons why product designers are exploring the human touch, and think it is important to consider haptics in product design.

With 18,000 mechanoreceptors in one hand – 31% of the total amount in the body – our fingers are tremendous tools that engineering product designers are increasingly considering when creating products such as tactile electronic displays, game controllers, smartwatches, smart wearables, and phones.
The word “Haptics” derives from the Greek word Haptikos, which means a sense of touch. The first-ever haptic technology device was Motorola’s world’s first vibrating phone, which provided haptic feedback in the form of a vibrating sensation.
Although Haptics is frequently used as a broader term to include both haptic technology and Haptic feedback and actuators, there is a marginal difference between them when it comes to haptics in product design. Haptic feedback and actuators is about how the sense of touch is used to communicate with the user. But Haptic technology refers to techniques and technology which use force, vibration, heat, or motion to imitate tactile sensations through various haptic actuators.
What is Haptic feedback?
Haptic feedback simulates the sense of touch to communicate with the user and generally refers to the mode of communication rather than a specific application or technology. Visual and audible feedback are used everywhere for many different purposes, from blinking the phone notification LED to smoke detector alarms. These explore two of the five senses – sight and hearing. Haptic explores another human sense, touch and has a variety of ways to communicate.

There are two categories of Haptic feedback viz; Kinesthetic and Tactile. Kinesthetic haptic feedback refers to the information the sensors acquire in your muscles, joints, and tendons. Imagine you are holding an electric toothbrush with it switched on. Kinesthetic perception gives you feedback on the size, weight, and position of your body and conveys it to the brain to process.
Tactile refers to the information acquired through the sensors that are in your skin. The tactile perception would give the user feedback on the toothbrush’s surface texture, vibration, pressure, and temperature.
Types of Haptic feedback
Haptic feedback can be grouped into the following five categories.
- Vibrotactile feedback
- Force feedback
- Electro tactile feedback
- Ultrasound tactile feedback
- Thermal feedback
| Haptic Feedback | Application Examples |
| Vibrotactile Feedback | – Mobile device notifications – Gaming controllers – Wearable devices – Touchscreen buttons |
| Force Feedback | – Simulators and training systems – Virtual reality (VR) controllers – Medical training devices |
| Electro Tactile Feedback | – Virtual keyboard interfaces – Sensory substitution devices – Rehabilitation devices – Virtual reality gloves |
| Ultrasound Tactile Feedback | – Mid-air haptic interfaces – Interactive displays – Augmented reality (AR) environments – Gesture-based controls |
| Thermal Feedback | – Gaming and virtual reality suits – Wearable devices – Temperature control systems – Therapeutic devices |
Vibrotactile Feedback
Vibrotactile feedback communicates with the user by using vibration to simulate the skin. Mobile phones or tablets vibrating when users interact with the touchscreen to imitate a physical button input is the most popular form of haptic vibrotactile feedback.
A vibration is either an oscillating, reciprocating, or other periodic motion of a rigid or elastic body displaced from a position or state of equilibrium.

Comparatively, the vibrotactile feedback system is simple, cheap, easily powered and controlled. It has been in use in many devices, for example, mobile phones, steering wheels, game controllers, and smartwatches. It requires hardly any tracking parameters and has a small power consumption.
But the downside is that vibrating motors cannot stipulate the depth and diversity of sensations. It may be irritating as compared with other stimulators. Further vibration motors are difficult to miniaturize efficiently and could negatively affect ligaments and joints.
Key Applications:
- Mobile Devices: Provides alerts and notifications through vibration.
- Gaming Controllers: Enhances gameplay by simulating physical impacts or events.
- Wearable Devices: Alerts users through vibrations for notifications or health metrics.
- Touchscreen Buttons: Offers tactile confirmation of button presses on touchscreens.
Force feedback
Motors are used in force feedback systems to manipulate the movement of an item held by the user. Force feedback is used in car video games and simulators, where the steering wheel is forced to turn on the user’s hands to replicate the forces encountered when cornering a vehicle.

Key Applications:
- Simulators and Training Systems: Replicates the physical sensations of driving, flying, or handling machinery.
- Virtual Reality Controllers: Provides realistic physical sensations, enhancing immersion.
- Medical Training Devices: Allows practice of surgical procedures with realistic resistance and feedback.
Electro tactile feedback
Electro tactile feedback uses electrical current to stimulate the skin nerves via electrodes placed on the skin’s surface. It affects not only the receptors but also the nerve ending with electrical impulses. Electrical impulses can activate any sensation by sending a small pulse to the electrode with varying amplitude, frequency, and amperage.

This feedback has numerous forms depending on the intensity and frequency of the stimulus provided to the wearer’s skin. The sensation can also differ depending on the pulse voltage and current, waveform, electrode size, material, and skin type.
There are two types of electrostimulation systems in electro tactile. Viz: Transcutaneous Electrical Neural (or Nerve) Stimulation (TENS) and Electrical Muscle Stimulation (EMS). You can read the difference between the two here.
The main advantage of the electro-tactile feedback system is that it has no mechanical or moving parts compared to a vibrotactile or force feedback system. Unlike other feedback systems, electro-tactile can simulate a broad range of sensations. One more advantage of electro-tactile feedback is that the electrodes can be assembled into any compact array and could be used to implement electro-tactile displays.
Key Applications:
- Virtual Keyboard Interfaces: Provides a sense of pressing keys in virtual environments.
- Sensory Substitution Devices: Helps in sensory replacement, like enabling touch sensations for prosthetics.
- Rehabilitation Devices: Stimulates nerves to aid in therapy and recovery.
- Virtual Reality Gloves: Enhances tactile interaction in virtual environments through electrical stimulation.
Ultrasound tactile feedback
Ultrasound waves are used in this haptic feedback to send sensations through the air and directly onto the user’s hands. Users can interact with virtual objects, perceive or feel buttons without touching them and detect mid-air gestures. These ultrasound feedbacks are achieved by using one or multiple emitters.

The main benefit of ultrasound technology is that the user does not need to wear any accessories. But this type of haptic feedback is quite expensive as compared to vibrotactile or electro-tactile haptic feedback.
Key Applications:
- Mid-Air Haptic Interfaces: Allows users to feel virtual objects or buttons in mid-air.
- Interactive Displays: Adds tactile feedback to surfaces without needing physical touch.
- Augmented Reality (AR) Environments: Enhances AR experiences with non-contact tactile sensations.
- Gesture-Based Controls: Provides tactile feedback for gesture recognition systems.
Thermal feedback system
Thermal haptic feedback uses human skin sensitivity to communicate via various techniques and technologies. Specific sensory receptors called thermoreceptors found in the skin’s dermis are responsible for temperature sensitivity.

The warmth you feel inside when you are holding a warm cup of water is because of the thermoreceptors in your skin. If the temperature is around 40oC or above, nociceptors would come into play and send pain signals to your brain.
The main advantage of the Thermal haptic feedback system is that it has no mechanical or moving parts as compared to a vibrotactile or force feedback system. The biggest drawback of the thermal feedback system is its large power requirement, as it relies on energy transfer.
Key Applications:
- Gaming and Virtual Reality Suits: Simulates environmental temperatures or physical conditions.
- Wearable Devices: Includes smart fabrics that change temperature for comfort or health monitoring.
- Temperature Control Systems: Used in personal climate control applications, such as heated or cooled clothing.
- Therapeutic Devices: Provides localized heating or cooling for medical treatments or relaxation.
Haptic technology
Haptic technology refers to techniques and technologies, which uses force, vibration, heat, or motion to imitate tactile sensations through various haptic actuators.
How does Haptic technology work?
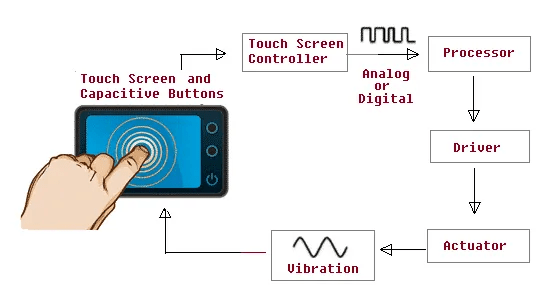
A typical Haptic technology system is composed of a touch device with a capacitive button, processor, drive circuit and an actuator. The input of the haptic technology system might be a touch consisting of a capacitive button that serves as an input to a touch screen device, it detects touch pressure which is then sent to the processor in the form of a signal. The Onward processor generates a specific waveform according to the touch and finally, the actuator is there to create movements based on the waveform produced by the processor as illustrated in the figure down below.
What are Haptic actuators?
Haptic actuators are used in mobile phones, touch screens, gaming controllers and gaming chairs to enhance the user experience by using haptic feedback to communicate with their sense of touch.
Haptic feedbacks such as vibrotactile, force, electro tactile, ultrasound tactile and thermal feedback explore users sense of touch via haptic actuators to notify, alert and simulate their senses for virtual experiences.
The most popular type of haptic feedback is phone vibration, which employs a tiny spinning motor as the haptic actuator. However, these are not the only actuators available on the market.
Types of Haptic actuators?
There are several more types of actuators used in diverse applications that can be grouped under the six basic types of haptic actuators listed below:
- Eccentric Rotating Mass (ERM)
- Linear Resonant Actuators (LRA)
- Piezo Haptic actuator
- Thermoelectric device
- Solenoid actuator
- Ultrasonic transducer or sensor
| Haptic Actuator | Application Examples |
| Eccentric Rotating Mass (ERM) | – Mobile phone vibration alerts – Game controllers- Wearable devices (e.g., smartwatches) |
| Linear Resonant Actuators (LRA) | – Touchscreen feedback (e.g., smartphones, tablets) – Virtual reality devices – Wearable haptics |
| Piezo Haptic Actuator | – Precision touchpads (e.g., laptops) – Haptic feedback in automotive controls – Medical devices |
| Thermoelectric Device | – Temperature control in medical devices – Cooling/heating in consumer electronics – Climate control seats in automobiles |
| Solenoid Actuator | – Mechanical push notifications (e.g., smart locks) – Pin-based haptic displays – Doorbell mechanisms |
| Ultrasonic Transducer or Sensor | – Non-contact haptic feedback (e.g., mid-air gesture interfaces) – Medical imaging (e.g., ultrasound) – Industrial inspection |
Eccentric Rotating Mass
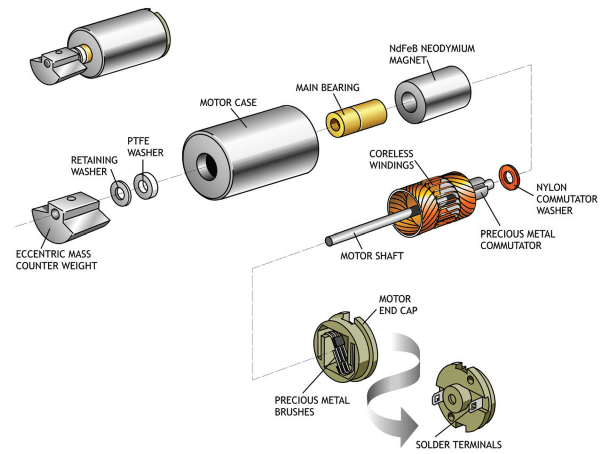
Eccentric rotating mass actuators are the oldest and one of the most common types of haptic actuators used in the market today. As the name implies, the ERM actuators are small magnetic DC motor that spins an eccentric unbalanced weight to create the desired vibrations.
As one of the most matured technologies in this haptic feedback, they are available in various power and performance specifications. Due to its mass and out of balance inertias, an ERM’s starting and shutdown times are comparably slower than LRA or Piezoelectric actuators and in the region of 50 to 100ms. The frequency of the motor influences the amplitude or the vibration strength of the output, therefore producing complex and precise waveforms challenging. You can read about how ERM works in a detailed note here.
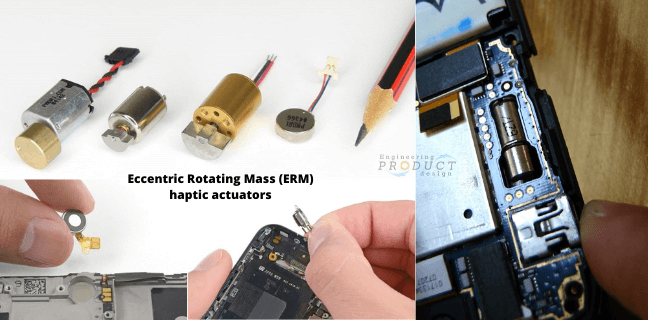
They are available in either Coin or Cylinder form with a range of motor technologies, including iron core, coreless and brushless.
Eccentric rotating mass vibration motors are cheap to fabricate. While they are not staggeringly cutting edge, they are utilized in the automobile sector to give haptic feedback in touch screen displays and dashboards.
Advantages & disadvantages of ERM
Advantages of ERM – Low cost, widely available, mature technology, Wide range of specifications & simple design and use
Disadvantages of ERM – Vibration signal amplitude relies on driven frequency, High power requirement, slow response (starting and stopping)
Key Applications:
- Mobile Phones: Vibration for incoming calls, notifications.
- Game Controllers: Provides feedback during gameplay.
- Wearables: Notification alerts in devices like fitness bands and smartwatches.
Linear Resonant Actuators (LRA)
Linear resonant actuators (LRA) function like a speaker, which vibrates to send haptic feedback. In its simplest form, it is a spring-mass system where the mass moves linearly back and forth with the help of a voice coil resulting in the desired haptic feedback.
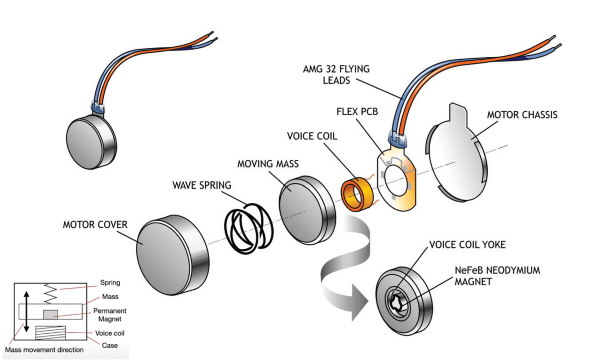
As seen in the exploded view of an LRA, a mass and magnet combination is suspended above the voice coil by a wave spring within the magnetic field of the permanent magnet. The spring constant of the spring defines the resonant frequency of the spring-mass system. The AC drives the voice coil, which will exert a mechanical force on the mass proportional to the current. It will result in the magnet moving linearly on the spring, with the displacement will increase and being maximum if the drive frequency matches the resonance frequency of the moving mass.
LRAs are increasingly common in smartphones, small touch screen tablets, portable navigation devices, portable gaming consoles and automobiles for basic vibration notifications.
Over the last several years, most phone manufacturers have converted from Eccentric Rotating Mass (ERM) vibration motors to the more efficient, responsive Linear Resonant Actuator (LRA) motors.

Apple introduced its version of LRA on their devices a few years ago called tactile haptics (shown above).
Advantages & disadvantages of LRA
Advantages of LRA – More acceleration for the same size compared to ERM, Easy amplitude modulation, LRA consumes less power compared to ERM, quicker response, Smaller in size, high power efficiency due to high Q, Reliable
Disadvantages of LRA – Only vibrates in one axis, Resonant frequency varies between each LRAs, due to manufacturing variations. Lower vibration amplitude outside resonant frequency due to narrow operating bandwidth
Key Applications:
- Touchscreen Devices: Tactile feedback in smartphones and tablets.
- Virtual Reality (VR): Enhances immersion by providing detailed haptic feedback.
- Wearables: Used in devices requiring subtle and precise vibration.
Piezo Haptic actuator
Piezo haptic actuator uses the piezo effect to generate vibration using piezoelectric material mounted in a cantilever beam configuration. Piezoelectric materials such as ceramics, crystals, bone, DNA and proteins generate an electric charge in response to applied mechanical stress and vice versa.
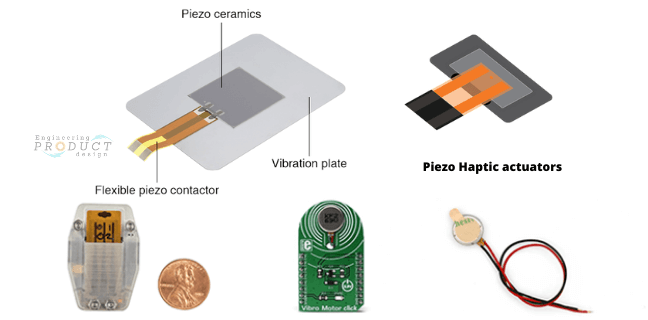
The piezoelectric effect, which causes the material to compress or stretch when an electric signal is applied, is used in piezoelectric actuators to cause vibration. The most common piezoelectric material for piezoelectric actuators is a kind of ceramic known as PZT. The bender and stack are the two most prevalent piezoelectric structures.
Because the actuator’s deflection is directly proportional to the control signal, it can be either made to oscillate or hold its position.
The picture below is a Stack version of a piezoelectric actuator made by sandwiching piezoelectric material between two metal plates.
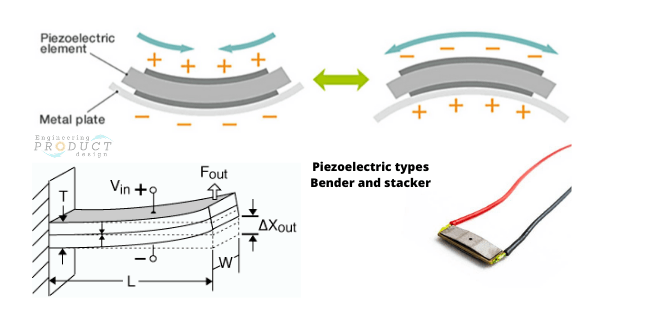
When an AC voltage is applied, piezoelectric material expands and contracts, which cause the element stack to warp up and down, as shown above, resulting in vibration.
In the case of the bender configuration, two pieces of piezoelectric materials are attached to form a cantilever beam. A voltage signal across the piezoelectric materials will bend and create significant displacement near the tip of the beam. Due to dual piezoelectric elements, the deflection is more compared to stack embodiment.
These actuators are more precise than ERM or LRA because they can vibrate at a wide range of frequencies and in more than one direction, unlike other haptic actuators.
Unlike ERM and LRA, the amplitude and frequency of the deflection can be controlled individually, allowing for considerably more sophisticated and detailed signal waveforms.
Some of the applications of Piezoelectric haptic actuators:
- Audio systems such as sounders, fire alarms and receivers
- Data storage includes MR head testing, spin stands, disk testing
- Precision mechanics such as linear drives, shock wave generation micro-pumps and active vibration cancellation
- Life science and medical technology share nano-litre pumps, scanning microscopy, micro dispenser, and cell penetration
- Optics, photonics, for example, autofocus system, fibre optic alignment, laser tuning, image stabilization and many more
Advantages & disadvantages of Piezo Haptic actuator
Advantages of Piezo Haptic actuator – Non-magnetic, holding power not required, Quick rise and fall time (1ms), higher resonance frequency, multiple vibration patterns, Low power consumption, smaller size and high precision
Disadvantages of Piezo Haptic actuator – Higher voltage, Nonlinear, sensitive to electrical overdrive
Key Applications:
- Laptops: Precision touchpad haptic feedback.
- Automotive Controls: Enhances the tactile feel of buttons and interfaces.
- Medical Devices: Precision feedback in surgical tools and diagnostic equipment.
Thermal haptic actuators
Most thermal feedback devices or actuators employ thermoelectric devices (TE) as their thermal source. Sometimes referred to as TED, it is a heat transfer solid-state module that transforms electrical current into heat flux using the Peltier effect and vice versa using the Seebeck effect.
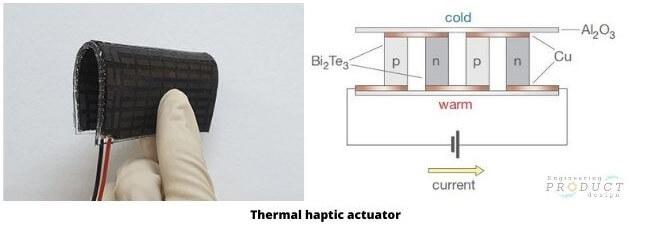
Peltier based haptic actuators are difficult to use due to their rigid substrate structure. Thermoelectric devices designed for an electric power generator based on the Seebeck effect have more flexibility and outstanding thermal output performance. Hence it was more suitable for a haptic thermal device such as a glove or flexible wearable.
Thermal haptic actuators are used in a wide range of applications such as VR headsets, gamepads, joysticks, and others to enhance the thermal haptic experience.
Advantages & disadvantages of thermal haptic actuators
Advantages of thermal haptic actuators – Spot cooling or heating, high precision temperature control, compact, lightweight, vibration-free, noiseless, Solid-state
Disadvantages of thermal haptic actuators – Latency, Hot and cold sides are very close to each other, Technologies not yet fully matured
Key Applications:
- Medical Devices: Used in devices for localized cooling/heating.
- Consumer Electronics: Thermal management in laptops and other gadgets.
- Automotive Seats: Climate control systems for heating and cooling seats.
Solenoid haptic actuators
Solenoid actuators, also known as impact actuators, forced impact actuators, or accelerated Ram actuators, are built similarly to Solenoids or bigger versions of linear resonant actuators. When compared to other actuation systems, Solenoid haptic actuators offer the broadest frequency response range.
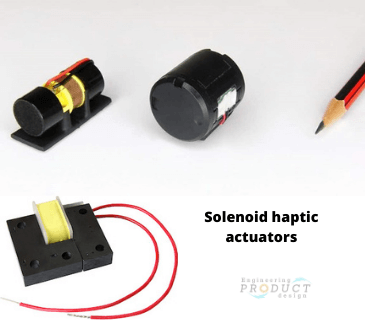
A solenoid generates an electromagnetic field around a moveable magnetic material core known as an armature. When the coil is energized it creates an electromagnetic field, which pulls and pushes the armature up and down the coil cavity, converting electrical energy into mechanical cyclic motion.
Sometimes the springs at each end of the mass prevent it from striking the outer casing or end stop. As a result, its building layout is comparable to that of a large LRA. In another form, the solenoid actuator is coupled to a touch surface through a lever and suspended via haptic suspension mounts. When the user touches the surface, it jogs it to mimic a button press.
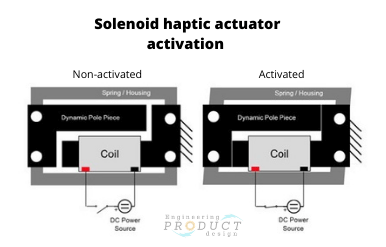
In some designs, the inner mass strikes an end stop incorporated into the motor housing, causing an impact to alert the user.They are generally employed in loud locations when the use of ERM or LRA is challenging due to ambient vibration.
- VR
- Game controller
- Virtual button
- Mobile phone
- Automotive dashboards and displays
Advantages & disadvantages of Solenoid haptic actuators
Advantages of Solenoid haptic actuators – Wide range of frequency response, higher forces and vibration amplitudes, impact sense
Disadvantages of Solenoid haptic actuators – Expensive as it required custom drivers, comparably large, higher power consumption
Key Applications:
- Smart Locks: Provides the mechanical actuation for locking mechanisms.
- Pin-Based Displays: Creates tactile surfaces by moving pins.
- Doorbell Mechanisms: Drives mechanical ringing or buzzing.
Ultrasonic transducer or sensor
Not every haptic technology necessitates users coming into contact with a surface. Contactless haptic technology eliminates the need for wearables or controllers. It generates tactile sensations in mid-air using technologies such as ultrasound or lasers.

Ultrasonic actuators use speakers or integrated 3D ultrasound sensors to transfer tactile effects onto a user’s hands.
Advantages & disadvantages of Ultrasonic actuators
Advantages of Ultrasonic actuators – Contactless experience for the user,
Disadvantages of Ultrasonic actuators – Expensive, only suitable for specific applications
Key Applications:
- Non-Contact Haptics: Provides haptic feedback without physical contact (e.g., gesture interfaces).
- Medical Imaging: Ultrasound for diagnostic purposes.
- Industrial Inspection: Non-destructive testing and evaluation of materials.
Pros and Cons of Using Haptic Feedback and Actuators
| Pros | Cons |
| Enhanced User Experience: Provides tactile sensations that make interactions more intuitive and satisfying. | Increased Complexity: Adds to the design complexity of devices and systems. |
| Improved Immersion: Enhances realism in virtual reality, gaming, and simulations by simulating touch and motion. | Higher Power Consumption: Requires additional energy, which may affect battery life. |
| Better Accessibility: Providing tactile cues and feedback helps users with visual impairments. | Potential Noise: Mechanical actuators like ERMs can generate audible noise or vibrations. |
| Realistic Feedback: Simulates textures, forces, and vibrations, improving precision in medical and industrial applications. | Cost: Adds to the manufacturing cost of devices due to additional components and materials. |
| Increased Engagement: Enhances interaction in educational tools, making learning more engaging. | Wear and Tear: Mechanical actuator parts can wear out over time and require maintenance. |
| Customizable: Feedback can be tailored to different applications, such as gentle vibrations for notifications or strong forces for simulations. | Space Requirements: Some actuators need significant space, impacting the overall design. |
| Non-Visual Feedback: Allows users to receive feedback without looking at a screen or interface. | Thermal Issues: Thermal feedback devices may have slow response times or thermal inertia. |
| Safety: Provides feedback in environments where visual or auditory cues are impractical, enhancing user safety. | Integration Challenges: Integrating haptic technology into existing systems can be complex. |
| Broad Applications: Used in consumer electronics, automotive controls, medical devices, and more. | Latency: Some systems may notice lag in providing feedback, affecting user experience. |
| Emotional Impact: This can be used to convey emotions or messages in a more tangible way (e.g., heartbeat vibrations). | Learning Curve: Users may need time to adjust to and understand haptic feedback cues. |